
意大利海军在2017年出版了《La Condotta del Tiro Navale da Bordo Nella Regia Marina 1900-1945》,这本书详细介绍了意大利海军火控技术的发展,而且对很多基础的火控问题也有细致介绍。虽然说关于对空火控其实没有多少内容算是一大遗憾,不过关于对海火控的介绍以及附带的各类结构、原理图都相当好。
意大利海军的火控一直以来被英语圈忽视、误解,中文圈就更不用说了。最近看了这本书的间战部分,刚好写出来做个总结。一战和之前的内容有兴趣可以咨询咖啡。

意大利间战火控计算机的起源
意大利海军在1925年正式开始新式火控计算机的开发项目,由Galileo和Girardelli两家公司负责,Girardelli公司后来在1929年被San Giorgio公司收购,由San Giorgio公司继续负责火控计算机的开发和生产。
这两家公司是意大利间战时期的主要火控设备提供商,但为了提升本国精密仪器水平和火控产能,意大利也邀请其他国家的公司在意大利设立子公司,于是德国西门子在1927年设立了一个OLAP子公司,此公司后来也协助两家意大利公司生产意大利公司设计的火控计算机(但并没有参与初期的火控计算机研发)。
在1928年,Galileo和Girardelli两家公司同时产出了新式火控计算机的样机,并分别安装在驱逐舰“朔风(Borea)”号和“旋风(Turbine)”号上测试,这种新式计算机被称为DFB tipo BOREA型,DFB是火控计算机开发过程中的两位重要意大利海军军官de Feo和Bertagna的名字缩写——这个de Feo就是后来提出中置炮塔设计的那个海军中将de Feo,他是意大利海军火控史的一个关键人物。
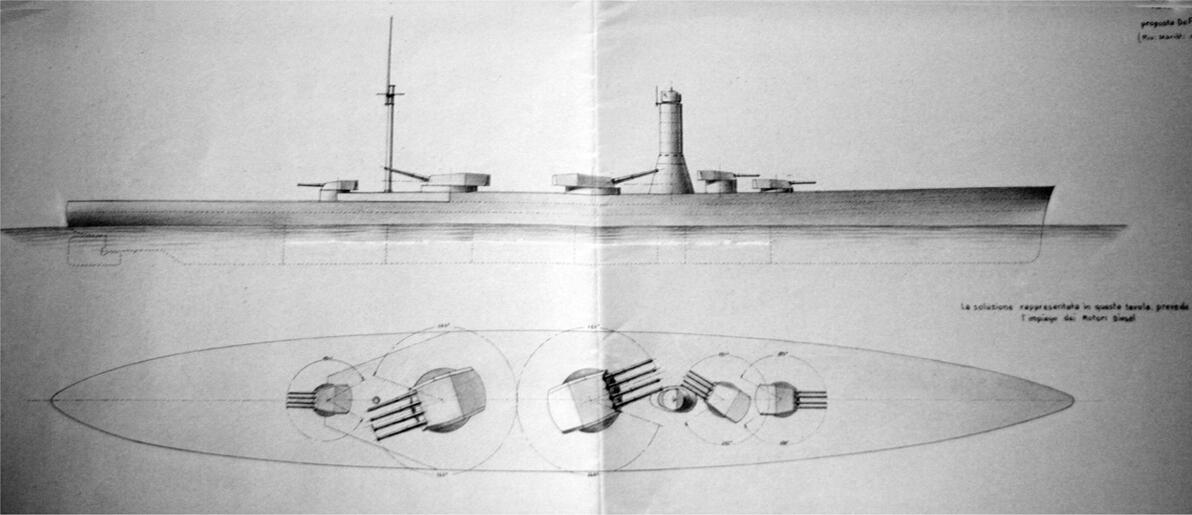
de Feo中将在1930年代提出的主力舰设计
根据意大利海军这本火控技术史,这种新式火控计算机完全基于De Feo在1922年提出的理念设计,后来意大利海军直接用Regia Marina为其命名,改称RM tipo BOREA计算机,量产型号根据1929年舰上的测试情况进行了部分改进,最终定型为RM-1(1^versione)计算机。
在火控计算机开发期间的1926年,意大利海军还购买了德国西门子公司的火控计算机并在驱逐舰“萨乌罗”号上测试到1929年,但据称此计算机并没有影响意大利自主设计计算机的开发。
Norman Friedman在他的著作《Naval Firepower》里说意大利海军30年代的计算机是基于为“特伦托”级购买的英国Barr & Stroud公司火控计算机设计的,但意大利海军的书中驳斥了Friedman的这种说法:意大利购买英国Barr & Stroud公司的火控计算机单纯只是因为国产的火控计算机还在开发,来不及在“特伦托”级于1928-1929年建成时定型服役,所以才通过购买现有火控产品的方式临时应急。
从设计理念和火控流程上看,意大利海军的火控计算机和Barr & Stroud公司的产品也确实有很多不同的地方。
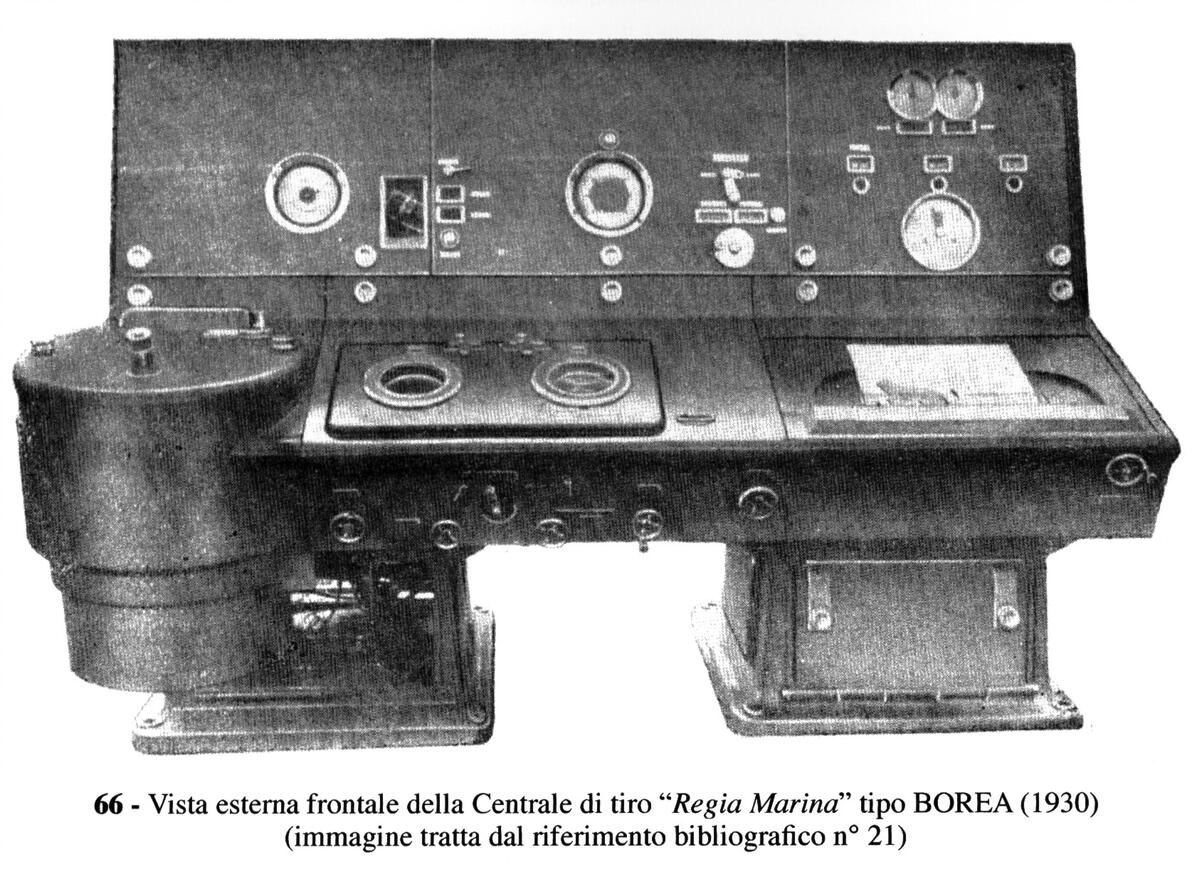
RM tipo BOREA火控计算机
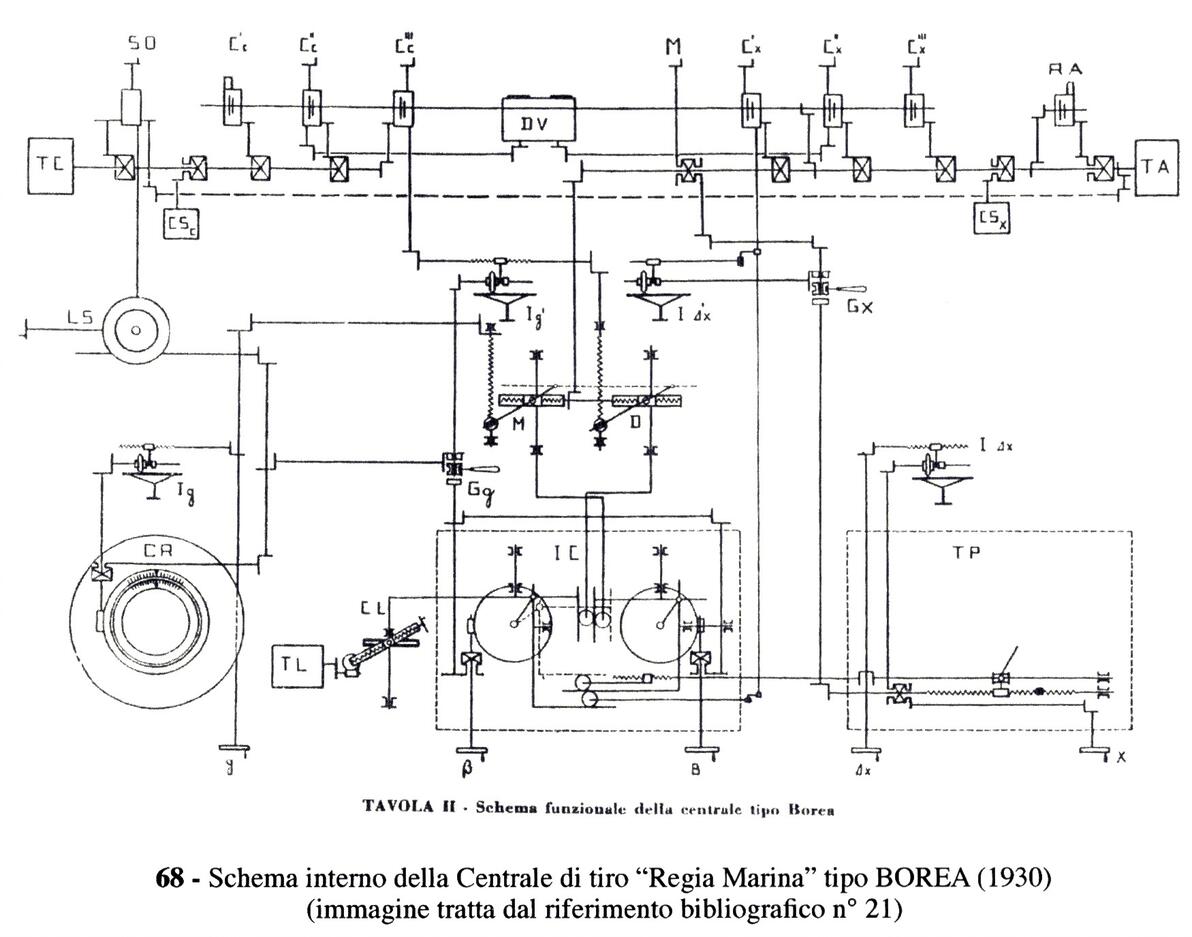
RM tipo BOREA火控计算机
RM tipo BOREA火控计算机一改此前一战火控装置的零散设备结构,把所有相关装置全部集成到了一个操作台式的箱体中,分为下方的平面部分和上方的立面部分。
下方左侧的筒状结构安装有意大利称为Gimetro的装置。此装置是一个基于陀螺仪的目标方位角和方位变化率测量装置,de Feo在1914年就联系了Galileo公司试图生产这种装置,最终在一战后完成。Gimetro通过一个三转子陀螺仪装置生成不受舰体转艏影响的固定参考方向,精度远高于普通陀螺罗经。指挥仪瞄准装置(意大利称为APG)获得的目标方位角在此装置内部剔除舰体转艏影响后得到相对Gimetro方向的方位角,APG的瞄准线(LOS)旋转角速度(即方位变化率)会引起Gimetro上两个圆环相对旋转使游标分离,这时操作员通过控制一个电机的转速使得两圆环产生反向的旋转速度来补偿,经过不断调整电机转速使游标最终保持稳定对齐。此时电机的转速经过换算后就等同于目标的方位变化率。
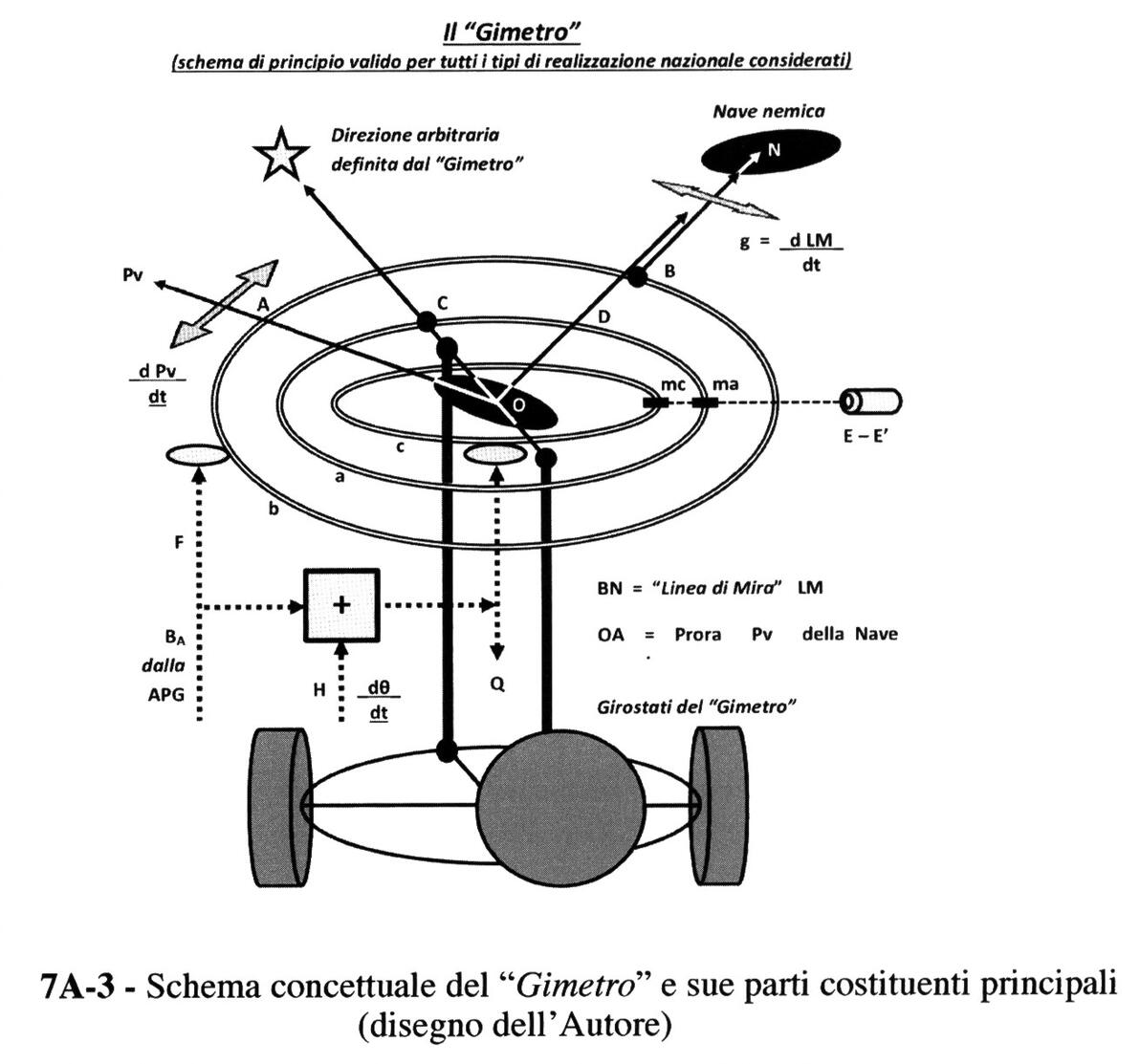
意大利的Gimetro装置原理

意大利Gallileo公司的Gimetro装置陀螺仪
计算机左侧还有一个Barr & Stroud公司用于测定舰体摇晃角度的稳定装置,意大利称为Bolla BARR。此装置在罐体内部设置浸没于液体中的浮子倒立摆装置,舰体摇动时带动装置外壳一起倾斜,而内部的浮子和液体在惯性作用下保持垂直,操作员目视并人工操作测量装置对齐浮子从而测出舰体的倾斜角度,这一装置的测量设备对齐指挥仪的LOS,因此测定的也是基于LOS的倾角。Bolla BARR测得的参数用于修正舰体摇晃对观测装置和舰炮瞄准的干扰,但此装置并不精确,在下一代计算机中被淘汰。
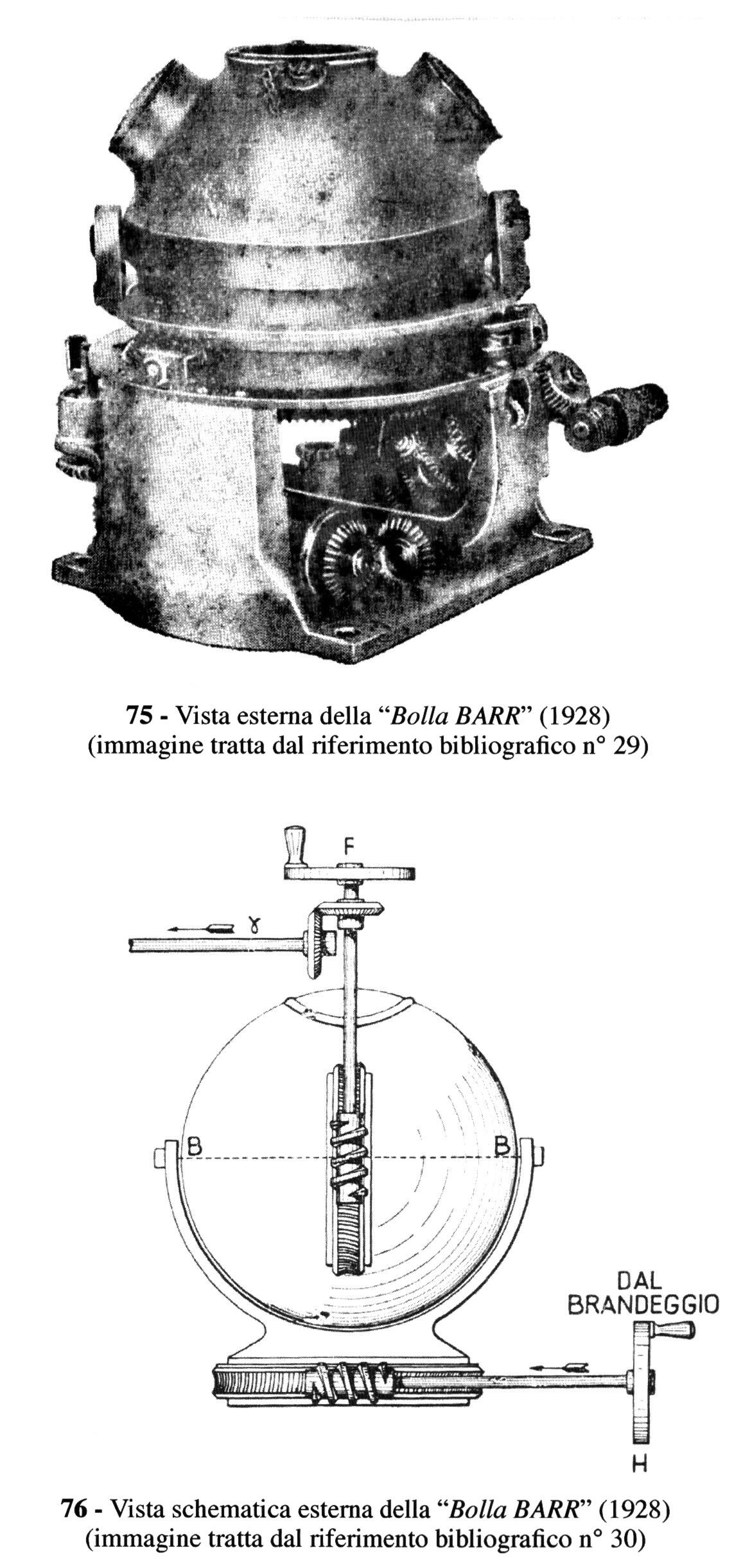
Bolla BARR装置
计算机中央是一个运动矢量显示装置,分为两个相对的表盘,一个显示本舰的航速航向,一个显示敌舰航速航向。两表盘的连线即为APG的LOS。计算机右侧是距离绘图装置。
计算机立面部分主要是各类弹道修正。
RM tipo BOREA计算机需要5名操作员,1人操作Gimetro,1人操作距离绘图装置,1人操作矢量显示装置,1人操作弹道修正装置。
RM tipo BOREA计算机的运动学求解理念类似英国德雷尔火控台,通过直接测量目标相对本舰的方位和距离变化率反解出目标航速航向,并用积分装置保持方位和距离更新,是一种结合Tachymetric和Synthetic的模式。
RM tipo BOREA计算机的火控问题基本假设和当时其他国家的火控计算机一致:在计算的时刻敌方的航速和航向保持不变,即目标处于匀速直线状态,且此状态通常会保持一段较长的时间。
如果目标改变了航向,就需要重新设定计算机。(如果目标处在曲线航行状态,计算机始终只能沿着目标当前航向给出提前量,不能沿曲线给出。曲线计算超出所有机械计算机的能力范围。)
RM tipo BOREA计算机的计算结构简图
火控问题求解的基础是设定好正确的目标方位角和距离参数,并在矢量显示装置上设定正确的目标航速和航向使运动问题能够得到解决(本舰的航速根据本舰航速计手动输入,本舰航向由陀螺罗经自动输入),意大利海军求得目标航速航向的方法是通过测量目标相对本舰的运动,并经过数学处理转化出目标的航速和航向。
求解所需测量的参数为初始目标方位角、初始目标距离、目标方位变化率和距离变化率。运动求解器的方位角在初始时刻人工根据APG的方位角示数输入运动求解器,后续由积分器自动生成,可人工手动修正;方位变化率由前文所述的Gimetro测定,即APG方位角自动输入Gimetro,人工控制方位变化率旋钮测得方位变化率并自动输入计算组件,而距离和距离变化率则由距离绘图装置获得:
距离绘图装置在绘图纸上将各测距仪的参数打点绘制“距离-时间”图,操作员使用一个游标装置,根据肉眼观测平均,来将游标放置到绘制距离点的平均距离上即获得初始目标距离,然后转动游标的指针对齐当前位置的绘图曲线斜率(实际是一堆散点的大致斜率),此斜率即为距离变化率。
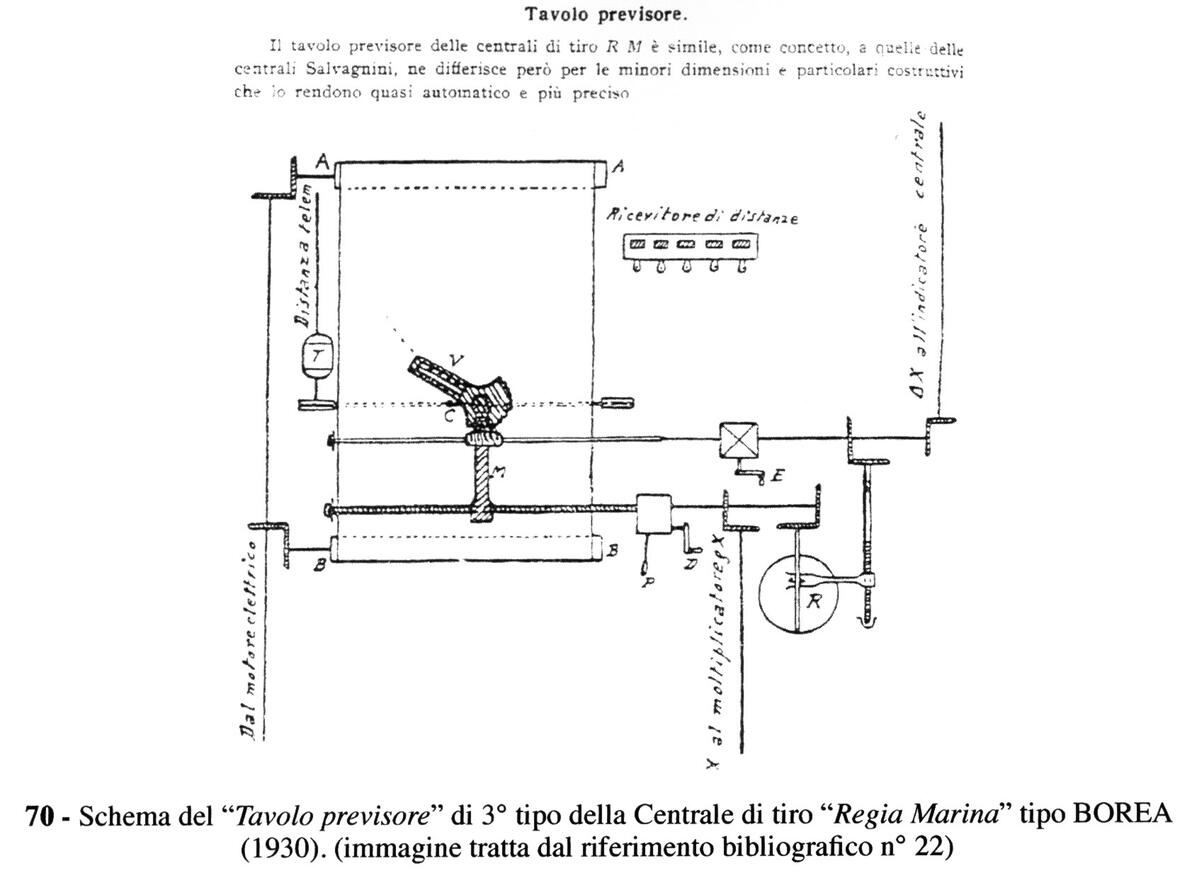
RM tipo BOREA计算机的绘图装置
方位变化率和距离变化率测得后作为相对运动矢量的组成部分可直接与本舰矢量叠加后得到目标矢量(意大利海军记为Vn Bruto粗略敌方矢量),但需要注意:此矢量并不直接用作目标矢量的输入。
粗略敌方矢量Vn Bruto将被分解为沿瞄准线方向的V’n Bruto粗略纵向矢量和垂直瞄准线方向的V’’n Bruto,两者可通过一对互相垂直的钢丝在敌方矢量显示装置上显示,表盘中心引向钢丝交点的矢量即为粗略敌方矢量Vn Bruto。
除了这种根据观测变化率获得敌方矢量的方法外,意大利海军还开发了测量目标航向与LOS夹角的设备,即当时各国都有使用的斜度仪(Inclinometer),可以由此装置大致测量目标航向夹角并根据炮术官估计的敌方航速来设置敌方矢量。
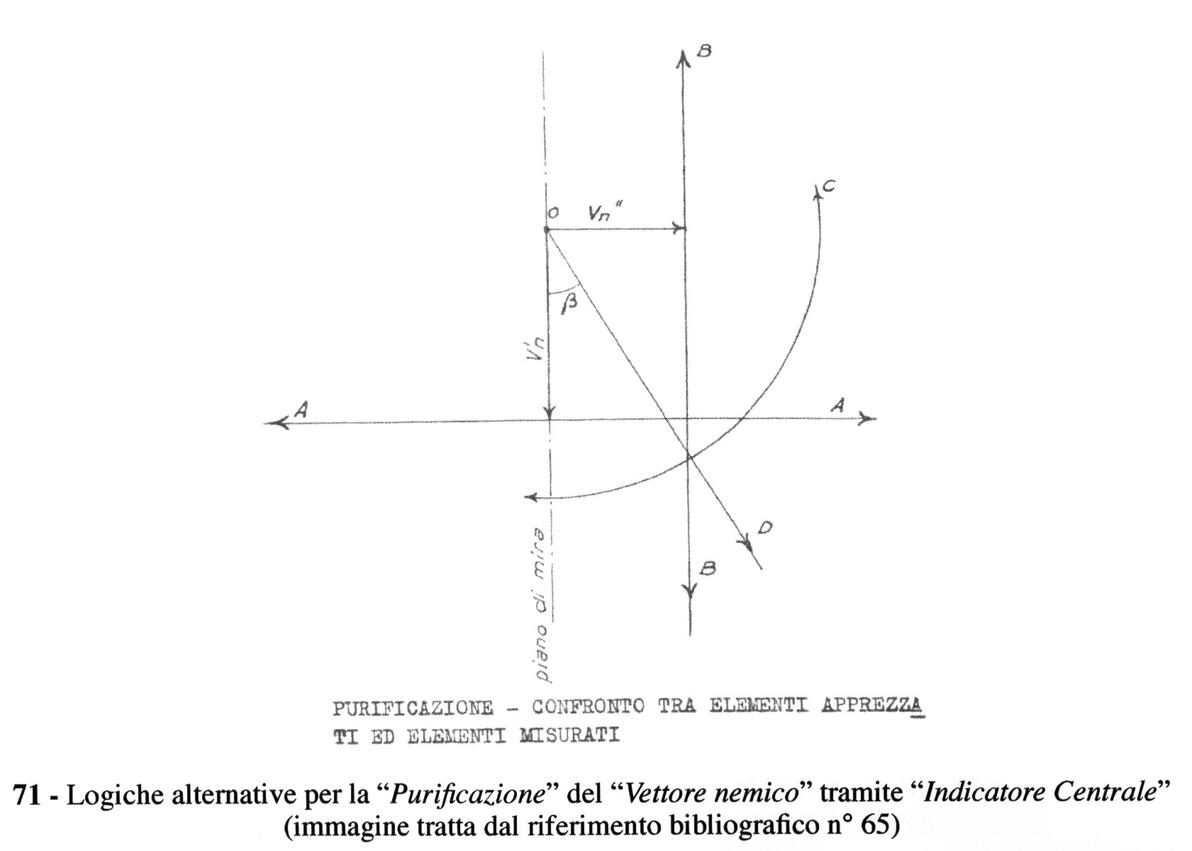
矢量显示装置示意图,AA钢丝给出基于变化率的粗略目标纵向速度V'n,BB钢丝给出基于变化率的粗略目标横向速度V''n,OD箭头相当于斜度仪给出的大致目标航向,弧线C为炮术官给出的估测目标航速,如果全部准确,这些线条应当交于一点,但现实中几乎不可能
在理想的状态下,只需要手动输入参数使得表盘装置对齐钢丝交点就能得到目标矢量,但实际并没有这么简单。
在实际瞄准中,APG的方位瞄准手可能时不时地略微偏离而不能保证准星始终对准目标的一点,舰体摇动也会造成的APG回旋角有一定的震荡,而Gimetro处方位变化率测量过程由于需要操作员“试错”也会不断变化,导致实际输入运动求解器的方位变化率是在持续震荡的。同理,测距仪本身的测距波动、绘图员人工平均和量取斜率的操作也会导致目标距离变化率持续震荡。两者结合就会使得计算机解出的粗略敌方矢量Vn Bruto是一个持续震荡变化的量,用于指示粗略敌方矢量的两根钢丝也就会分别不断地上下、左右震荡。
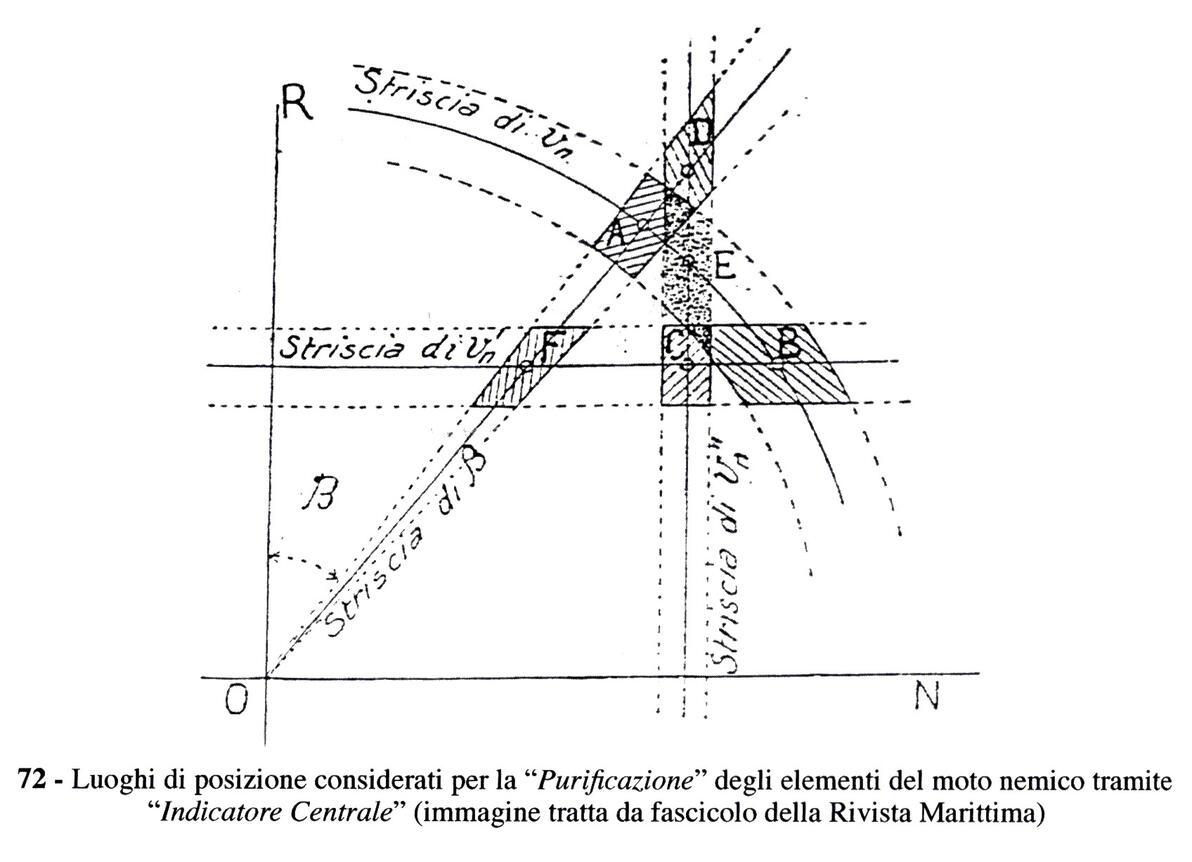
矢量显示器上各种方式获得的粗略数据的误差和震荡
为了消除这种数据“噪声”,意大利海军选择使用人工“过滤”的方法来获得“纯净”的目标矢量:考虑到粗略敌方矢量总是在真实敌方矢量的附近震荡,只要矢量显示装置操作员目视估计出钢丝震荡的平均值,就能手动将敌方矢量显示器设定到接近真实敌方矢量的位置。
这种目视平均并手动输入的值称为纯净敌方矢量Vn Pura,此数据为一恒定值不会震荡,也就能稳定后续的火控计算。
虽然单从文字上看人工“过滤”只需要目测平均值即可,似乎非常简单,但实际操作上却有困难,这是由于表盘的设计导致的:
在全局坐标系下,目标的矢量是稳定不变的,但计算机上却是固定LOS不变的相对坐标系,而在相对运动过程中,LOS相对敌方航向的角度在持续变化,所以目标矢量将绕表盘圆心转动,轨迹为一段圆弧,转动的角速度也持续变化,钢丝的交点位置实际就是绕着这段圆弧震荡。
这样一来,想要准确得到矢量平均位置就对操作员的经验和训练水平提出了较高要求。这一问题直到30代后期的意大利最新式火控计算机上才得到解决。
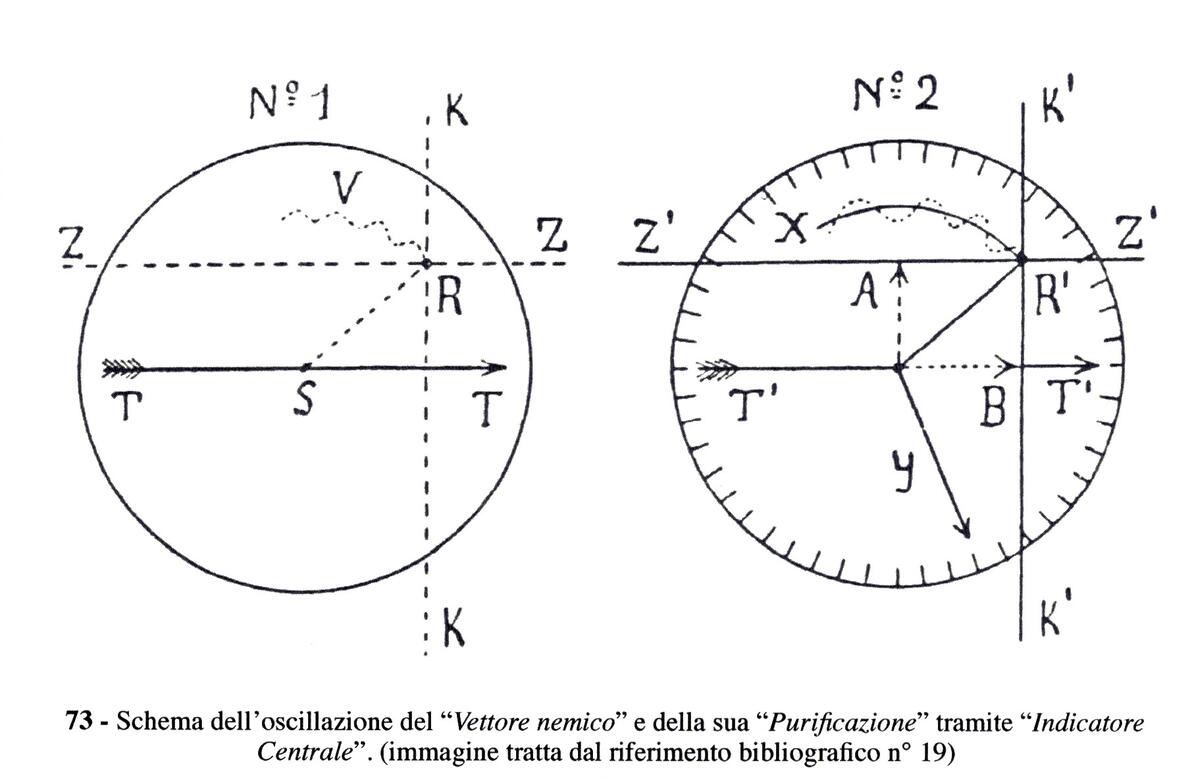
矢量显示装置的“过滤”过程
完成敌方矢量设置后,运动求解器就能持续更新目标的方位和距离,并通过显示装置和距离绘图装置展示出来。如果生成距离有误,距离绘图员就能发现游标偏离,此时他转动距离手轮就能修正计算机距离,方位角的修正也是相同的。计算机生成距离和方位角有误时也意味着敌方矢量设置有误,此时敌方矢量显示表盘就很可能较大幅度偏离钢丝的“平均”交点位置,矢量显示装置操作员就会再次调整矢量表盘对齐。经过不断地修正,计算机设定的“纯净”敌方矢量最终将高度接近真实的敌方矢量,也就能精准地用于计算提前量。
RM tipo BOREA计算机的弹道计算较为简单,在运动求解器解出距离变化率和方位变化率后,弹道组件根据这两个数据计算出提前量并加入风偏等修正。
弹道飞行时间的计算使用了迭代循环求解:弹道组件接收计算机生成距离Xa Pura,根据弹道凸轮获得飞行时间Tf,飞行时间将乘以距离变化率得到距离修正量△Xcorr-V’r并叠加在输入的生成距离Xa Pura上得到未来距离Xf,然后重新生成新的弹道时间Tf,这个弹道时间再乘以距离变化率叠加到Xa Pura上获得新的未来距离Xf,这一循环组件的最终效果是通过迭代使得Xf准确,此迭代过程机械实现,在计算机启动、连杆开始转动时就持续实现,并不消耗时间。
计算出准确的未来距离Xf后,此距离将经过一个手动输入的综合大气密度和初速差异的修正、一个手动输入风向风速的风偏修正、根据弹着观测手动加入的修正以及舰体倾斜的修正,最终得到舰炮需要的仰角数据和方位角数据。
但需要注意的是,早期的这型计算机Bolla BARR装置测量的是APG的LOS倾角而非舰炮射击线(LOF)的倾角,因此在修正上存在一定的误差。另外,在弹道计算中一直使用的是目标未来距离而非炮弹真正飞行的弹道距离(弹道经各种修正后虽然在二维平面上的距离和目标未来距离一样但是实际飞行距离不同,需要调整弹道时间),也引入了一定的误差。
最终定型的RM-1(1^versione)火控计算机修改了整体外观和结构,放大了矢量显示表盘以优化“过滤”操作,进一步细化各类显示表盘,计算机成为了大型立式结构,弹道修正组件操作区转移到计算机背面,但其内部核心计算原理和RM tipo BOREA一致,主要组成结构及其功能也保持不变——即左侧设置Gimetro、中央设置矢量显示装置、右侧设置距离绘图。
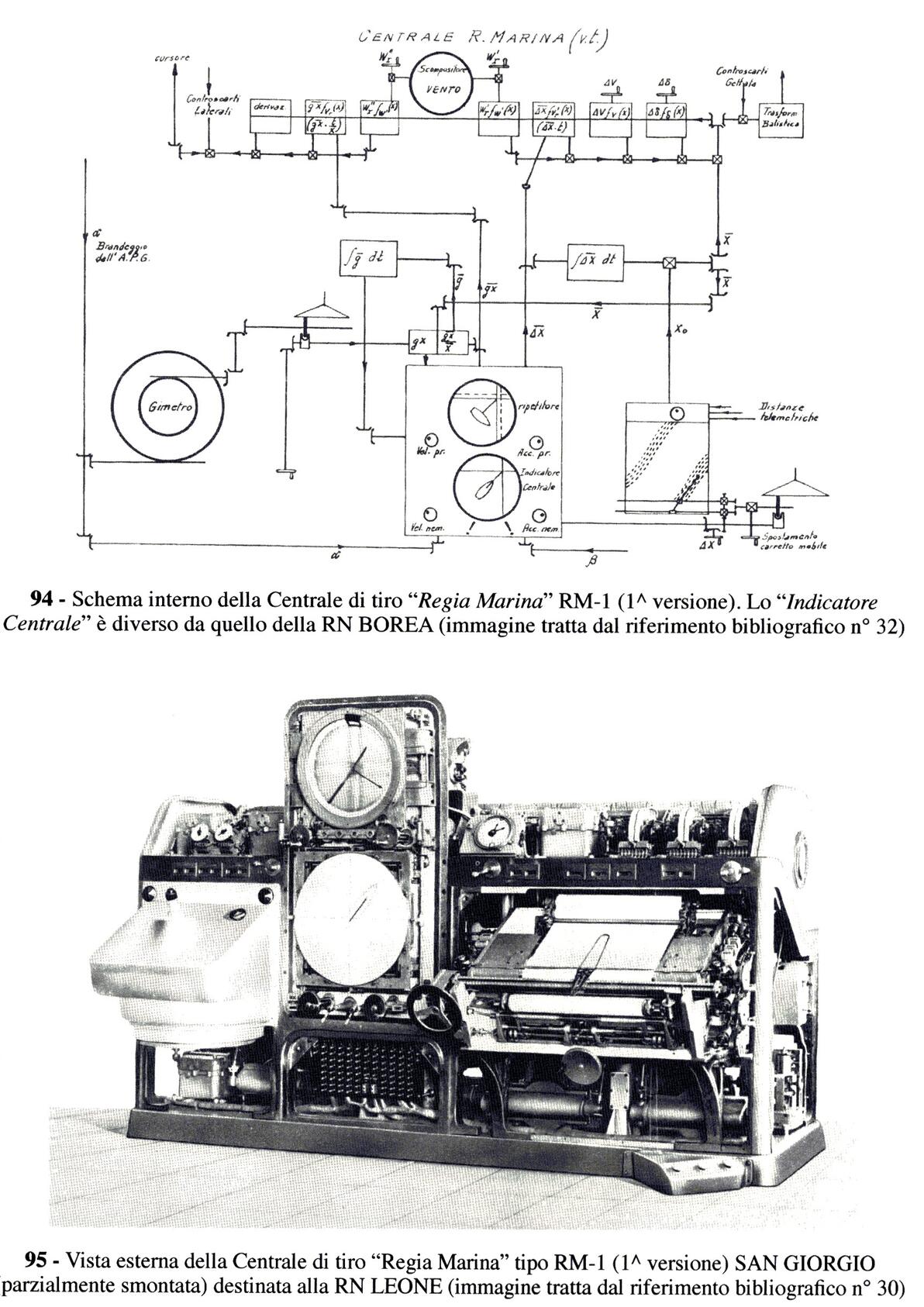
San Giorgio公司生产的RM-1(1^versione)火控计算机
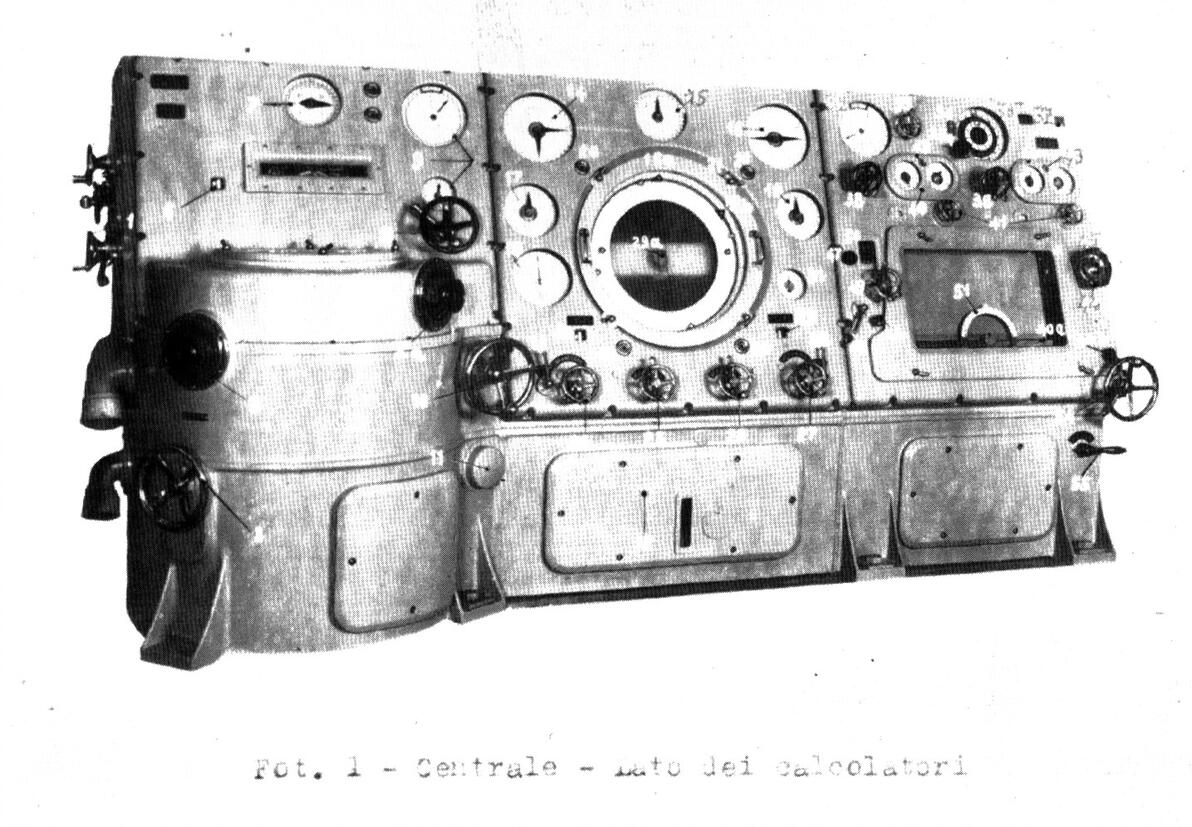
OLAP公司生产的RM-1(1^versione)火控计算机
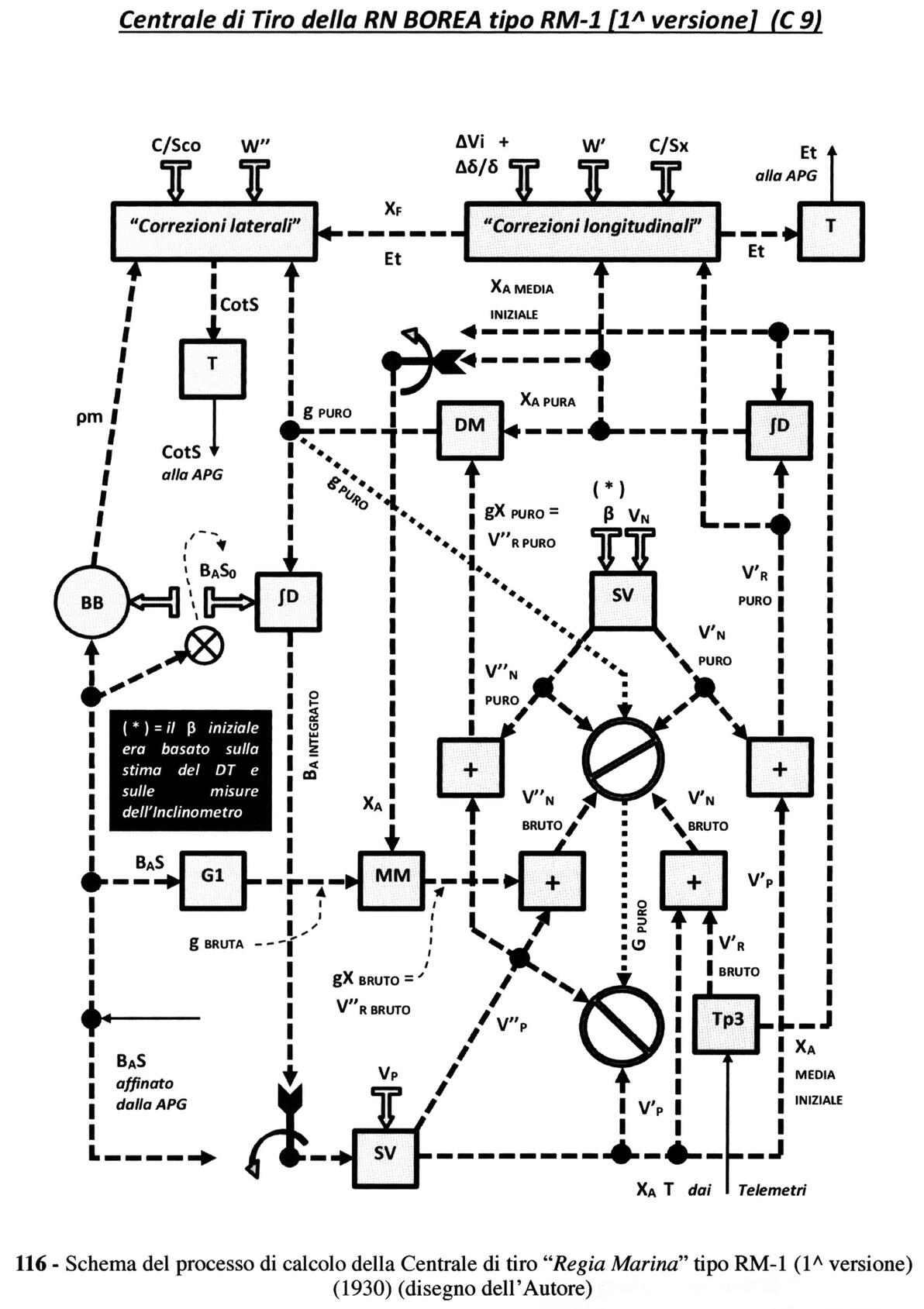
RM-1(1^versione)火控计算机的部分计算结构计算流程示意图
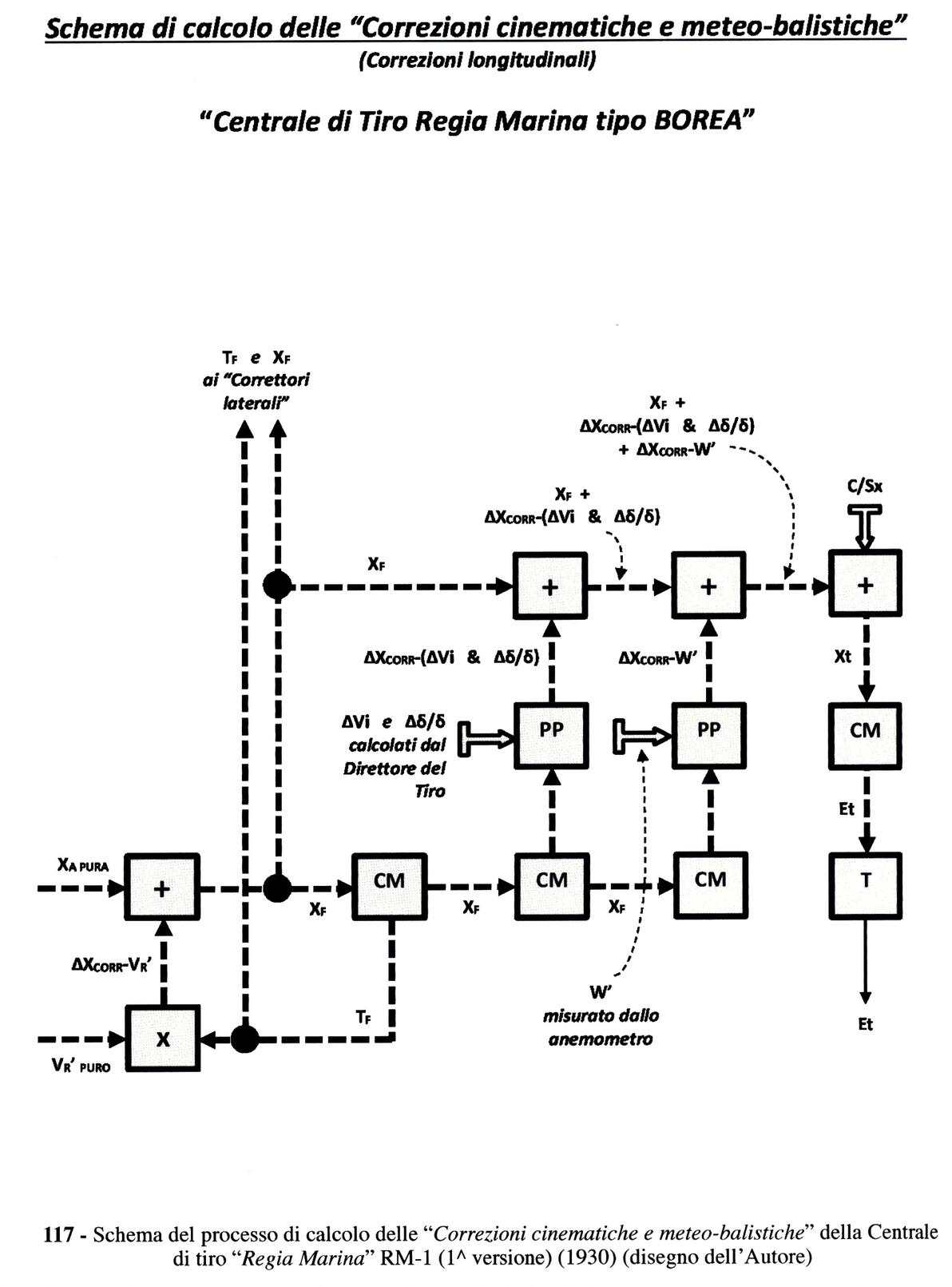
RM-1(1^versione)火控计算机的部分弹道计算组件计算流程示意图
意大利引进的Barr & Stroud公司计算机经过Galileo公司要求的改进后被称作BARR & STROUD mod. GALILEO计算机,此计算机仅在“特伦托”号和“的里雅斯特”号上使用。英国Barr & Stroud公司的这款计算机和当时英国与美国海军的火控计算机类似,以假定目标航速航向输入计算机、根据输出值和观测值对比来修正输入的目标航速航向,是非常典型的synthetic火控,对于观测值的精确度要求并不高,也不适用Gimetro来测量方位变化率,其工作流程和意大利的RM式火控计算机也有较大区别。此外,英国计算机的弹道计算基于弹道距离求解飞行时间,和意大利初代火控计算机不同。
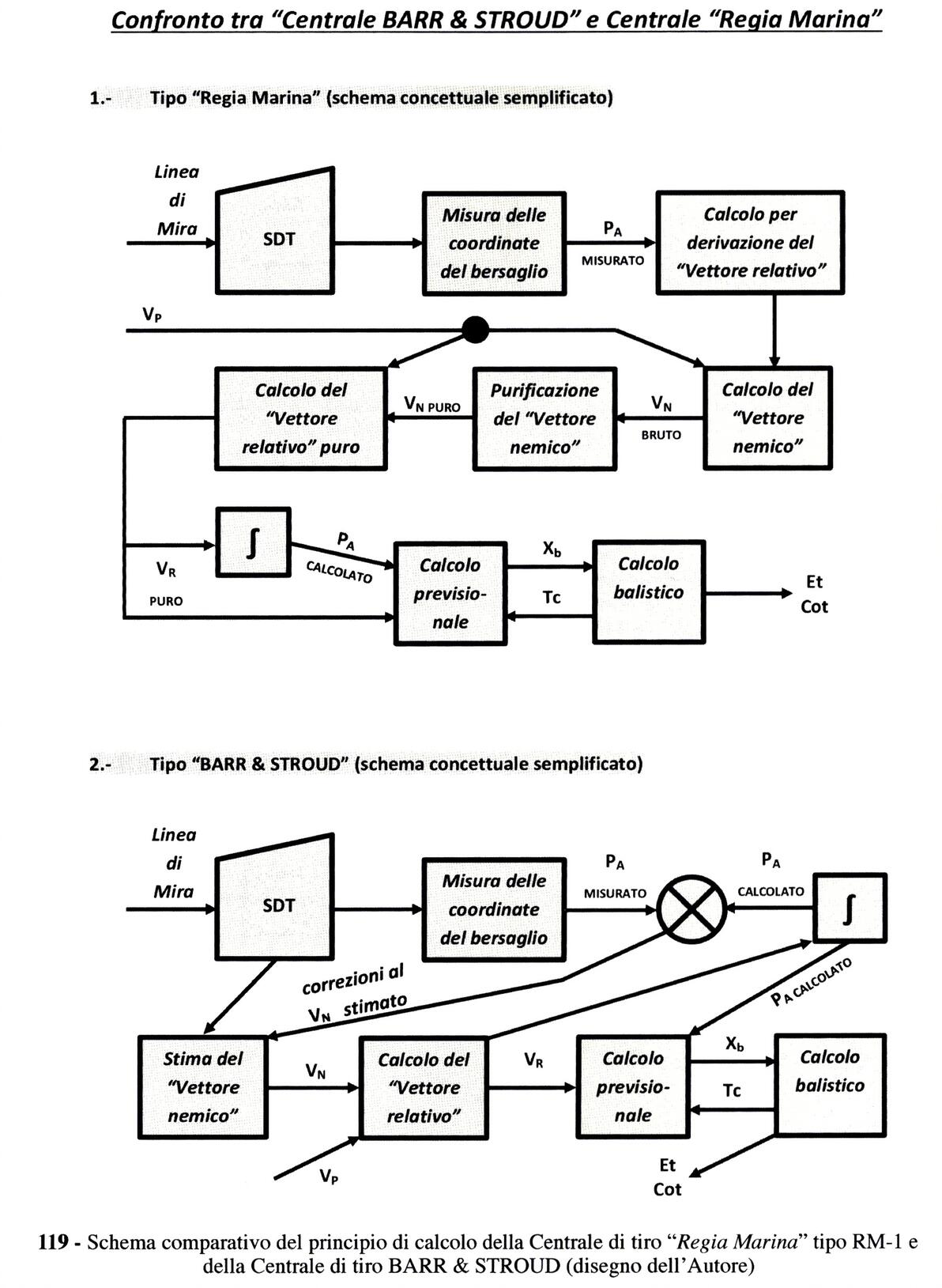
意大利RM-1型火控计算机作业流程和英国Barr & Stroud火控计算机对比
根据意大利海军在书中的描述,在能见度和海况良好、距离不超过测距仪的精确测定范围时,RM-1(1^version)火控计算机在目标完成变速或变向2-3分钟后的火控解航速误差约1节、航向误差约5-10°,在目标完成变速或变向5分钟后航向误差降至1°,不过航速误差很难降到0.5-1节以下。在能见度不佳、海况不佳或距离超过测距仪精确范围时,上述误差都会进一步增大。
意大利海军对RM-1(1^versione)的表现很满意,后续型号基于使用中暴露的一些问题做了进一步改进,但基础的计算模式——测量变化率并人工“过滤”出目标航速航向——以及整体布局设计仍然保持不变。详见Part 2。